TMInterface-AS-SaiMoen
Collection of TMInterface AngelScript scripts.
Project maintained by Sai-Moen Hosted on GitHub Pages — Theme by mattgraham
Understanding Bruteforce Intuitively
By SaiMoen. With the help of threadd.
It is assumed the reader is roughly familiar with how bruteforce works in TMInterface (what-is-bf). It’s also mostly theoretical, as the practical part can only truly be learned by doing it yourself, or learning from how others use bruteforce in practice.
I will also be adding some wikipedia links for further reading, feel free to ignore these.
Intro
Recently, I was reading some messages in the TMInterface Discord server, when I came across the following message(s) sent by threadd (see image below). The context is essentially that someone couldn’t get a noseboost, as bruteforce simply wasn’t finding anything. So, threadd explains that you can’t just throw something into bruteforce and expect that it will try to solve your problems.
{kind=link}
I agree with the general take, so now I will try to expand on it a little more. You see, when using bruteforce, you really get the time to think about why it all works this way.
Trying Everything
So wait, why can’t we just find the best inputs for each frame, from start to finish? Well, ignoring the fact that ‘best’ can hardly be defined, TMNF has a lot of possible states the car can be in. The basic calculation shows that the car could branch out to (up to) 524292 different possible states from one tick to the next.
This is mostly because of the following:
there are 65536 steering values to the left, 0 steer exists, and then there are 65536 steering values to the right.
So even if we only consider steer inputs, we can never look through all of them for any non-trivial amount of time.
For example, trying all possible permutations of steering values (i.e. global/exhaustive search)
assuming an attempt rate of 1000/s over just 4 ticks (0.04s in-game), would take about 9.353 billion years.
Since that won’t be happening, we have to search in a different way (Local Search). The way bruteforce does this, is to try stuff randomly. If we only keep improved versions of the run we started with (the base run), the result improves over time. Which begs the question, what do we count as an improvement?
Looking For Improvements
The gut reaction of any TrackMania player would probably be to just count speed increase as an improvement. This is actually a strategy that works in many situations, but it has some problems: the bruteforce algorithm can really just go anywhere and do anything to get improvements.
This highlights an intrinsic fact about bruteforce, which is that it doesn’t care about your run at all. And if a certain set of inputs results in, as threadd described it, a ‘lower energy state’ compared to another, then bruteforce is more likely to do that. As long as it gets attempts that are ‘improvements’ to it, along the way. To make it more likely to take a path you want, you must make your path the most likely one (if it isn’t already). In order to achieve that, you can use a bruteforce mode that applies more constraints, and/or use certain settings to do so.
For instance, triggers can help your car stay in a certain spot rather than going somewhere unintended.
Additionally, the bf_condition_speed variable can set a minimum speed,
that will automatically reject an attempt if it goes below that speed.
Another important aspect to this is the quality of the base run, see the following: Garbage In, Garbage Out
I’m not trying to roast your runs, that is just what this phenomenon is called. If bruteforce gets a bad base run (compared to what you want to happen), then it has many opportunities to go down a trail of ‘improvements’ that are not really what you wanted. Sure, you can argue that the base run can’t be perfect because then you wouldn’t need bruteforce anymore, but what I’m trying to say is that there exists a base run that makes you work with bruteforce as efficiently as possible.
Search Space
An important term here is the Search Space. The search space in this case is essentially all possible situations (states) that the car can find itself in. What we would like to do is search through all of those, but we’ve already established that that would take too long.
So we have to move through this space in some way, and try to find a better state like that. The base run is like a starting point, from which we can search. Whenever bruteforce finds an improvement, we move to a new state in this space that we defined to be ‘better’, then we search from there, and repeat.
Okay, so we can ‘walk’ somewhere, using improvements as our steps, but where do we end up? Here are some possible cases:
- We walk so far that basically any attempt at another step fails. This can happen when the bruteforce result becomes very optimized. Just to reiterate, this doesn’t mean you will find it maxed, just that it is hard to find a run that is better (in this analogy: a step forwards) according to your bruteforce setup.
- We walk until we get to a state where we are not quite maxed, but we can’t progress because of something specific to the run that is eating all our attempts, like an obstacle. If we could just step back and try a different approach, we could get around it. However, since that would result in a (short-term) worse run according to our bruteforce setup, it can’t do that. This is also known as a local optimum, which, as opposed to a global optimum, may not be the best solution. Since bruteforce is a local search, it does not necessarily try to find a global optimum.
- We have a plan to walk a difficult route (e.g. from nosepos to 1000 km/h noseboost), but our starting point is so far away that we can’t take the first steps. Meaning that we should have started with a better nosepos so that our steps actually get us somewhere.
If anything, the first case is a special form of the second case, where the local optimum is also the global optimum (or at least very close to it). In any case, at some point bruteforce will get locked into a certain local optimum, so you better set it up with a base run and settings so that it finds a good one.
Bruteforce ‘locking’ itself into a specific run also has to do with what it does to your inputs, but that is a topic for another time…
Relation To Settings
To preface, here is a short definition for ‘bruteforce controller’ (also known as validation handler): A mode which can basically do anything in the simulation context, e.g. Bruteforce, Incremental, DrawFuture, etc.
This part covers the Input Modification settings found in the built-in bruteforce controller, which you should be familiar with already. I might also phrase things using the ‘walking’ anology from earlier.
Input Modify Count
This setting loosely controls how large a step can be. It can be useful for harder tricks since your base run doesn’t really look like what you want. In theory, it should be set proportionally to how much you expect the run to change. In practice, people usually prefer a certain value or range of values for a certain kind of situation.
Input Change Timeframe
These are the From/To times that determine when bruteforce gets to change inputs. The length of the timeframe is the difference between the From and To times.
What happens every so often, is that someone who is new to TMInterface will try to bruteforce the entirety of their manually driven run in finish time. Then they will get confused that it not only runs very slowly, but also it doesn’t seem to change their inputs before a certain time.
The reason that happens is the Butterfly Effect. Changing earlier inputs will have an increasingly significant effect on the rest of the run, so it becomes very unlikely that bruteforce can actually get an improvement by doing that.
Instead, you should use the finish command to artificially finish a run so you can get a replay with inputs.
If you do this after a part that you want to bruteforce, you can then set the timeframe to include all relevant inputs.
In practice, that means that you won’t see a timeframe of over 6 seconds that much.
Then again, I can’t say that there is no situation in which you would want a larger timeframe.
The same goes for a minimum length, if you make the timeframe short enough then nothing will change,
but it all depends on what you’re doing.
Maximum Steering Difference
When a steering value is changed, it will use this to determine a random number to add. The reason the maximum value for this setting is 131072 is because that is the jump from -65536 to 65536 (or vice versa). There has been some confusion about certain values supposedly making your run invalid, which is false. Bruteforce doesn’t do extended steering, and in fact that feature has been removed as of TMInterface 2.1, so any value is ensured to result in valid TAS runs.
Anyway, this setting will actually work fine for a wide range of values. Much like Input Modify Count, for harder tricks this is generally set higher. For normal driving you could in theory even get away with a value as low as 13107.2, because of how turning rate works. However you will often have less smooth inputs than that, so you’ll want to have more than that in practice.
Commonly used values include powers of 2 like 16384, 32768, 65536, 131072. The most used one is 65536 as far as I know. And again, if the run doesn’t need to radically change, just become more optimized, then you don’t need as high of a value.
Maximum Time Difference
This can optimize up/down press/rel timings, which can help for something like noseboosts, to try out more different states. Since it works based on time, just like the Input Change Timeframe, a slightly different value can have a considerable impact.
Fill Inputs
If you want to target some very specific inputs within your timeframe, you might not want this. Generally, this is a pretty useful setting to ensure that bruteforce has plenty of inputs to work with, therefore I tend to have it enabled.
Notes On Other Settings
Read The Docs
Hopefully, whoever wrote the bruteforce mode or plugin has documented its settings in some way. If you want to get a deeper understanding of what they do, and what values you should consider setting, then make sure to read it.
You might not always completely understand the documentation, but hopefully it gives you a better idea on what to do.
Eval Is Not Input Change
Something that I commonly see is that people will enter the same timeframe into the input change timeframe, and whatever evaluation timeframe the selected bruteforce mode uses. If these needed to be the same, whoever wrote that mode could’ve just grabbed the input change timeframe directly. Obviously, it serves a different purpose than that. In most modes, this timeframe is when it checks whether the current attempt counts as an improvement. That means that making it super wide like the input change timeframe could have some unexpected results.
For example, if you bruteforce a sharp turn to keep as much speed as possible, you will probably set the input change timeframe to match the start and end of the turn itself. If you also set the evaluation timeframe to be that, then the mode could do just about anything, like improving the speed before the turn, if your speed is highest at that point. What we actually wanted was exit speed though, so we should really restrict the evaluation timeframe to be more like 0.1-0.5 seconds at the end of the turn. In fact, these timeframes don’t even need to overlap, that’s just how it usually goes.
For instance, the sd_entry plugin does require a longer evaluation timeframe.
More specifically, it should wrap (the start of) the SD.
Also it would be better to overlap it with the end of the input change timeframe,
since you still want to change some of the SD inputs themselves.
It all depends on what works best for the bruteforce mode and the run.
Overview Of Built-in Bruteforce Modes
Written with TMInterface 2.1 in mind.
Checkpoint Time
This is probably the least useful one, but it does have its moments. The main use of it is to get the lowest time on a given checkpoint. That might sound like an opportunity to make your run faster at every checkpoint, but there are two problems:
- Reaching it faster could be bad long-term, e.g. losing all your speed to take a turn tighter doesn’t work after the checkpoint.
- Time-based bruteforce without extra precision might need a big change to the base run to actually save 0.01s.
If your goal is to respawn at the checkpoint, the first problem goes away, because you always respawn in the same way, so only the time you reach the checkpoint matters. This is why, if you want to keep going after the checkpoint, you are most likely better off ignoring the fact that there is a checkpoint and using another bruteforce mode anyway.
Finish Time
This is a mode that also solves the second problem (as seen above). It uses ‘precise time’, a way to measure time more precisely than the game engine actually allows for. By halving the speed on the tick before you finish, if the car still makes it, the time is somewhere below .xx5 and vice versa (then the process repeats), but I digress.
As we’ve already covered before, trying to bruteforce an entire run on this mode (or any mode really) won’t work. If your run has a decent end, this mode can bring the finish time down a bit, maybe a few hundredths, maybe even more.
Unfortunately, if you do a bugfin, precise time breaks (with the current implementation).
Trigger
This mode allows you to create a trigger, which will make it so bruteforce will only evaluate whether a run is better when the car is inside of the trigger. So, you can essentially force all improvements to stay where the trigger is. That doesn’t mean an improvement can’t do something unexpected, but at least it doesn’t go somewhere else entirely.
As for the distance/speed ratio, if you just need speed, then obviously go for (mostly) speed. When you set it more to the distance side, then something interesting happens. The car tends to turn more towards the trigger, until it’s perpendicular with the nearest face. If it succeeds at this, then you will end up with a weird looking turn, where the car aligns itself to go straight into the trigger.
Otherwise, you can use this to take a turn really sharply, by entering the trigger at a very sharp angle. When you bruteforce for trigger distance, it will try to reach the trigger sooner, so it will straighten out that angle. Here is a crude drawing as an example:
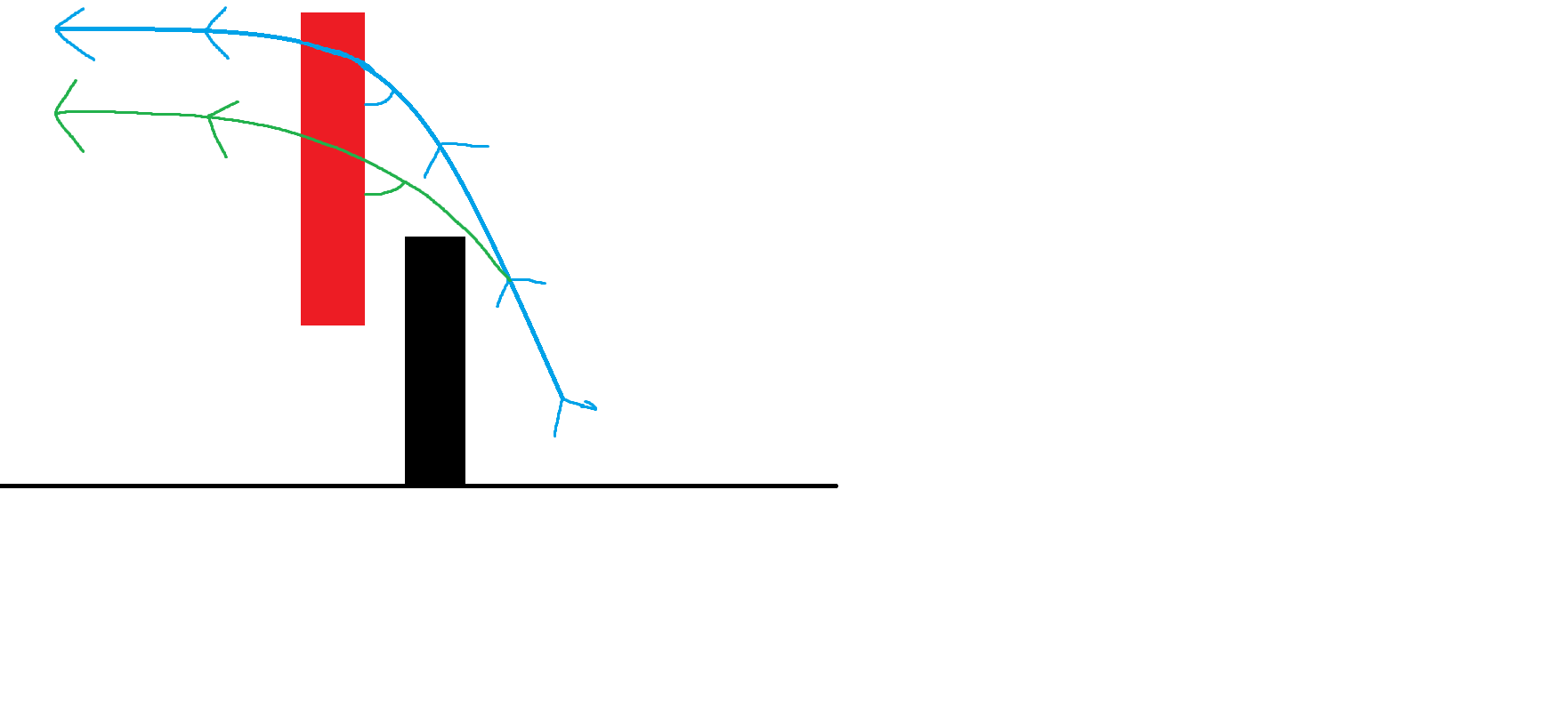
The blue arrow is the base run, and the green arrow is what could happen in trigger distance, when the car straightens out due to the rotation of the trigger compared to the rotation of the car.
If the base run does not hit the trigger, there are some additional things to consider.
For example, if you are trying to noseboost to some place further away, then placing a trigger in that place will mean that the trigger’s angular size is very small when viewed from the noseboost. In other words, it’s very unlikely that you will be able to hit it from the place you noseboost from. This can be solved by not using triggers, or by aiming with a closer trigger, then slowly moving the trigger away, and bruteforcing each time you move the trigger (so your aim becomes increasingly precise).
As a final note on this mode, let’s consider how one might use Custom Stop Time. Usually it just comes down to knowing when you want to reach the trigger, and not allowing bruteforce to find some random nonsense that happens after that time. If the replay you’re using is a bit too long, you can also use this setting instead of making a new replay.
Single Point
In this mode, there is just a single point in 3D space, around which everything happens. There is a tradeoff between this and triggers, where forcing the car to be in a trigger is both an upside and a downside. If you use point mode, then you are always able to find improvements, regardless of how far you are away from the point. However, if it can find enough speed, then it can decide to go somewhere else without being stopped by a trigger.
As for the distance/speed ratio, using more distance generally helps when aiming the car to take a certain line. Using more speed will make the mode behave more like ‘speed bf’, which is completely fine as well, even 100% is useful. An additional advantage to triggers is that more distance doesn’t really make it turn towards a face of a trigger, because there is just a point, and that’s it.
If you have 100% distance/speed set, then the Eval timeframe should just be set to at which point you want to maximize speed. Otherwise, the position of the point actually becomes important, so you should set it to be around when you expect to be closest to the point (with some margin, of course).
Summary
The most practical information:
- Know why we use bruteforce, and what it can/can’t do for you.
- Understand what the settings do, and how they can help you while bruteforcing.
- Provide base runs that make it more difficult for bruteforce to find anything that you don’t want, which is usually ensured by the base run being good enough to avoid bad outcomes.
- Try to reason about what bruteforce is doing as improvements come in (ask yourself where it is going with this).
- Experiment!
The following bonus sections add some more thoughts on various related subjects.
Why Not Replace Bruteforce With AI
Currently, there are several TMNF AI agents in development that use TMInterface, however, they are quite tricky to set up and take a lot of time to train. This is not practical if you are trying to TAS, and you should really be doing the routing yourself, and when optimizing smaller sections of a track (as a TASer), bruteforce with a good base run will probably win against AI anyway.
Maybe in the future, when they are easier to set up and produce runs that can’t be ignored, we could see some kind of AI assistance for TASing emerge.
Are All Bruteforce Controllers Random
So we know that the built-in bruteforce controller (i.e. ‘bruteforce’) pretty much requires randomness in order to function. However, this doesn’t need to be the case for all controllers.
Incremental
For example, the Incremental controller (made by yours truly), has modes like sd_railgun and wallhugger,
for which it wouldn’t really make a lot of sense to introduce random numbers.
There is no need to pick random times to change inputs, the controller always goes from the start time to the end time.
This process happens one tick at a time (also referred to as iteration, to avoid confusion). On each iteration, they run the same logic to find a certain steering value, so they will behave deterministically. So it would be possible to make an SD mode that picks a random steering value at some algorithmic step, but why would you?
As a side note, it could be argued that the incremental sub-modes are not ‘bruteforce’, strictly speaking. They rely mostly on heuristics to avoid checking all steering values instead. Though, there’s not any problem with calling them bruteforce as an umbrella term.
Input Smoothers
Another example would be input smoothers. The purpose of an input smoother is to take a set of inputs, and find a specific set of inputs that still produce the same output. That new set of inputs is expected to be as smooth as possible, e.g. no unnecessary spikes. Here it would actually be difficult to introduce random numbers, since you want the same run afterwards.
Interestingly, this kind of plugin can actually be useful for bruteforce. If steering values are closer together, then basically any change will result in a different run, meaning that no attempts go to waste on meaningless changes.
I will spare you the details on how that works (hint: turning rate). As I said, that is a topic for another time…